Here you can find various pictures and some discussion on different subjects.
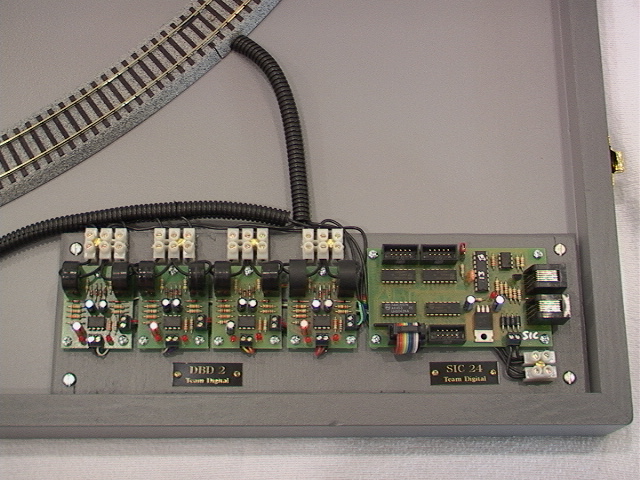
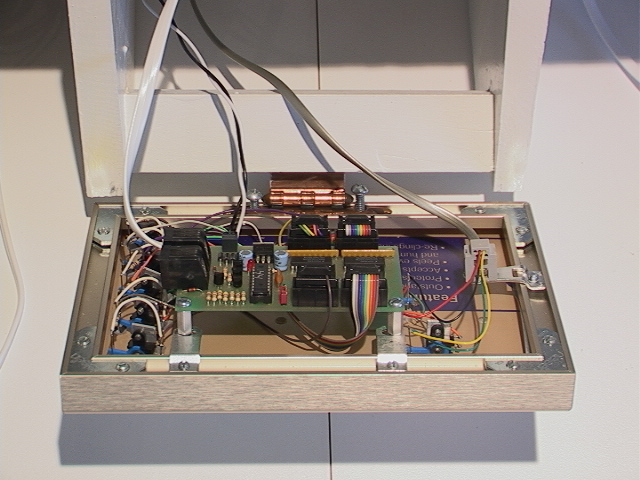
This is Team Digital's portable display case that contains a circle of track with DBD2 block detectors and a SIC24 signal controller. It hinges in the middle with latches and a handle to make for ease of carrying.
This is used to demonstrate the operation of the SIC24 and DBD2. At some point there may be some actual signals put in the display.
David Mac Kinnon built the case, Team Digital had it painted, laid the track and added the electronics. Phil Klein has come up with a concept of matching the speed of locos. The concept uses a circle of track and a JMRI script to automatically control the loco and program the decoder speed table. This case makes a perfect platform for Phil's concept.
The SIC24 provides block status information via locoNet to a computer which runs the JMRI script. There are 16 pieces of track that make the circle. Two pieces of track are used for each block making a total of eight blocks. The time that it takes the loco to move between blocks is used to measure the loco speed.
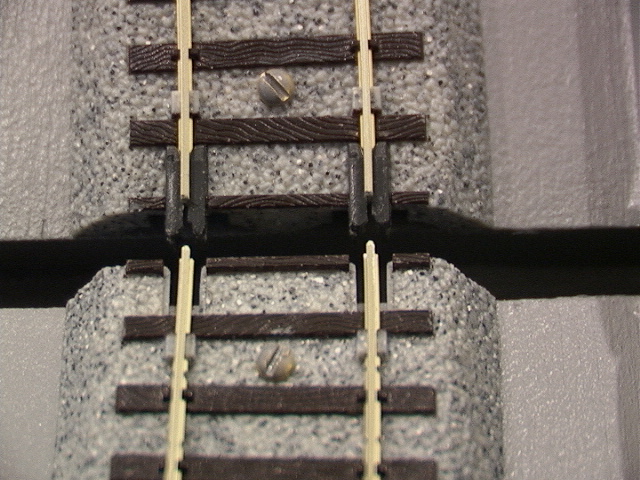
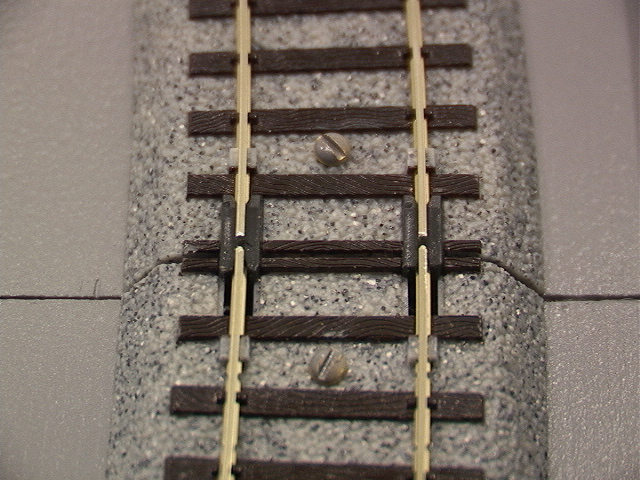
Here are a couple of pictures showing how the track pieces come together where the table hinges. About 1/3 was cut off the end of an isolated rail joiner. The other 2/3 of a joiner was put on each of the rails on one side of the hinge. The end of the joiner that was cut off was chamfered. The other rail slides into it very nicely when the case opens. The small plastic piece that is part of the joiner keeps the rails from touching since this is a block boundary. Kato track was used.
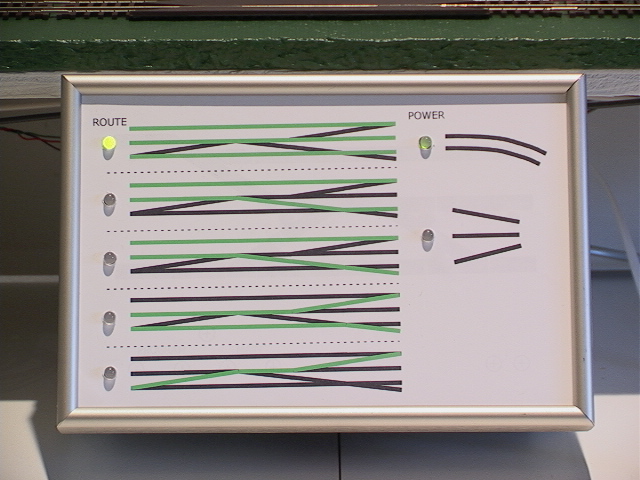
This is a route control panel for a three track plant. To select a route push the LED which then lights showing which route is selected. Notice that there are actually several possible routes per selection. This reduces the number of LED push buttons needed. Five LED push button are needed to include all the possible routes. All push buttons are connected to a SRC8 which drives the five LEDs and controls a SMD82 which drives the switch machines.
There are two push-on push-off LED buttons that control the power to two groups of storage tracks. One output of the SMD82 is configured for manual control to drive a relay for each track group. The two LEDs are connected to the relay to show when the track is powered.
The SRC8 is mounted to the back of the panel which is a picture frame that is hinged to the bench work. Most of the wiring is at the panel for easy access.
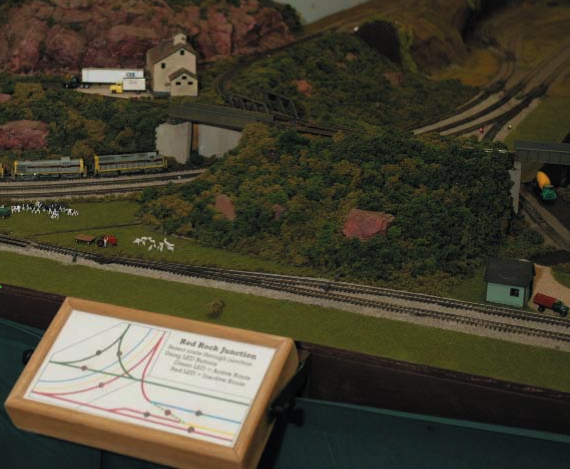
Another example of a SRC8 mounted to the back of a panel is the one used at Red Rock Junction. David Thompson wrote an article 'Control Panels for an N-Trak Junction' which includes the design and function of the panel. You can get the PDF file here.
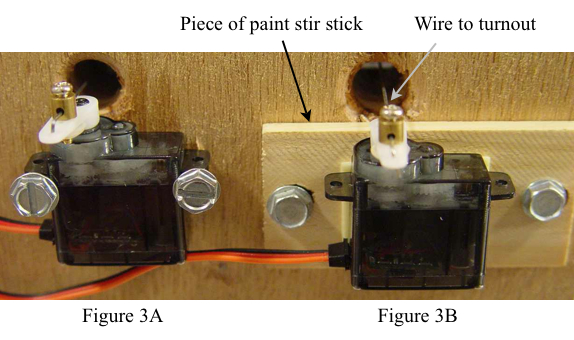
There are several ways of mounting a servo as a switch machine. One way is to just screw the servo to the wood under the turnout. The large headed screws keep the servo in place. See figure 3A. Another way is to cut a piece of a paint stir stick and drill two over size holes in it. The over size holes allow the servo to be moved once it is in place. The servo is stuck to the paint stick with double sided foam. See figure 3B. Double sided form could also be used to stick the servo directly to the bench work.
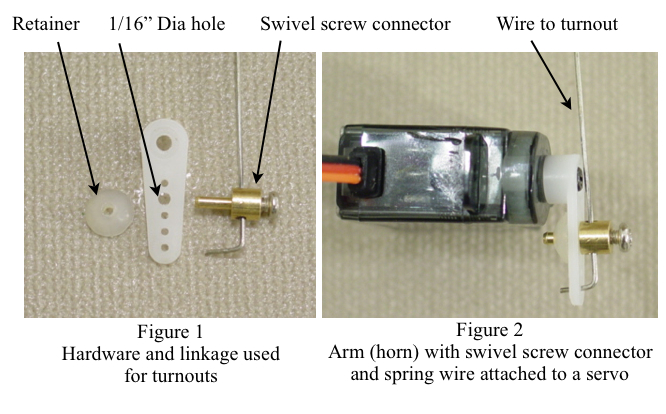
Figure 4 shows a couple of ways the wire controlling a semaphore can be connected to the servo arm (horn). Whenever the swivel screw connector is used there must be a 1/16” diameter hole drilled into one of the holes in the servo arm (horn) so it’s shaft will fit. See figure 1. Another method in PDF
Picture of some N&G semaphores using small servos. An article (Modeling a Cantilever Mounted Semaphore by Thomas M. Green) was published in the "The Warbonnet" third quarter 2009. See webpage at: https://sfrhms.org/publications/warbonnet/v15-2009/
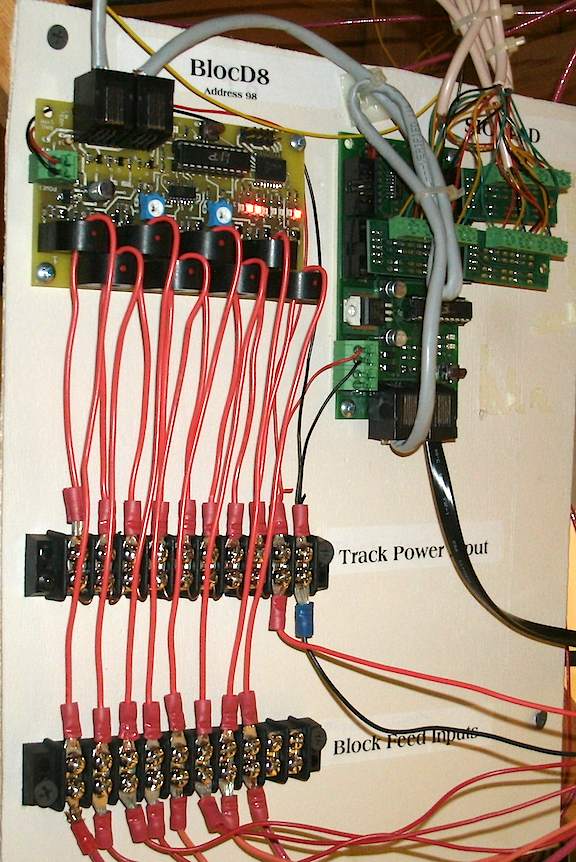
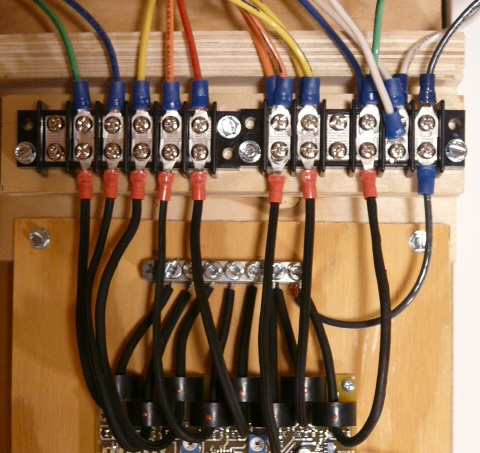
A prototype BlocD8 being tested by Larry Eggering. Notice how he routed the wires through the sensors. This is the correct way for best performace.